Tail Segmentation#
The following notebook illustrate the TailSegmentation class.
Loading dependencies
import numpy as np
import matplotlib.pyplot as plt
from megabouts.tracking_data import TrackingConfig, load_example_data, FullTrackingData
from megabouts.config import TailPreprocessingConfig, TailSegmentationConfig
from megabouts.preprocessing import TailPreprocessing
from megabouts.segmentation import Segmentation
Loading Data and Preprocessing#
TrackingConfig and TrackingData similar to tutorial_Tail_Preprocessing
df_recording, fps, mm_per_unit = load_example_data("fulltracking_posture")
tracking_cfg = TrackingConfig(fps=fps, tracking="full_tracking")
head_x = df_recording["head_x"].values * mm_per_unit
head_y = df_recording["head_y"].values * mm_per_unit
head_yaw = df_recording["head_angle"].values
tail_angle = df_recording.filter(like="tail_angle").values
tracking_data = FullTrackingData.from_posture(
head_x=head_x, head_y=head_y, head_yaw=head_yaw, tail_angle=tail_angle
)
t = np.arange(tracking_data.T) / tracking_cfg.fps
tail_preprocessing_cfg = TailPreprocessingConfig(fps=tracking_cfg.fps)
tail_preprocessing_cfg = TailPreprocessingConfig(
fps=tracking_cfg.fps,
num_pcs=4,
savgol_window_ms=15,
tail_speed_filter_ms=100,
tail_speed_boxcar_filter_ms=25,
)
tail_df_input = tracking_data.tail_df
tail = TailPreprocessing(tail_preprocessing_cfg).preprocess_tail_df(tail_df_input)
tail.df.head(5)
| angle | ... | angle_smooth | no_tracking | vigor | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| segments | ... | segments | |||||||||||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ... | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |||
| 0 | -0.101865 | -0.092813 | -0.107645 | -0.110575 | -0.047699 | -0.145887 | -0.130414 | -0.058892 | -0.128705 | NaN | ... | -0.051057 | -0.055168 | -0.055898 | -0.061701 | -0.061091 | -0.069420 | -0.115014 | 0.000183 | True | NaN |
| 1 | -0.082618 | -0.087957 | -0.096951 | -0.092459 | -0.119418 | -0.043354 | -0.099788 | -0.101741 | -0.171555 | NaN | ... | -0.046070 | -0.052906 | -0.056578 | -0.063577 | -0.062286 | -0.064780 | -0.091617 | 0.000321 | True | NaN |
| 2 | -0.093377 | -0.095235 | -0.094292 | -0.105936 | -0.073785 | -0.084193 | -0.144378 | -0.112398 | -0.042585 | NaN | ... | -0.041909 | -0.050905 | -0.056916 | -0.064832 | -0.062943 | -0.060658 | -0.072246 | 0.000430 | True | NaN |
| 3 | -0.092590 | -0.083650 | -0.100938 | -0.088223 | -0.097370 | -0.099559 | -0.101538 | -0.091272 | -0.021459 | NaN | ... | -0.038574 | -0.049166 | -0.056913 | -0.065467 | -0.063063 | -0.057053 | -0.056900 | 0.000512 | True | NaN |
| 4 | -0.086849 | -0.081982 | -0.096705 | -0.118475 | -0.046264 | -0.136459 | -0.115412 | -0.085300 | -0.015487 | NaN | ... | -0.036064 | -0.047688 | -0.056569 | -0.065483 | -0.062646 | -0.053965 | -0.045579 | 0.000565 | True | NaN |
5 rows × 32 columns
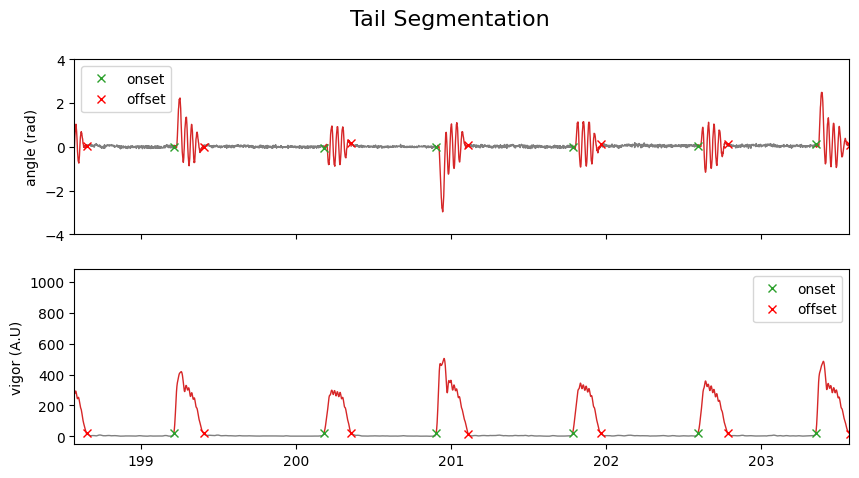
Segmentation using tail vigor#
Set the threshold to 20:
tail_segmentation_cfg = TailSegmentationConfig(fps=tracking_cfg.fps, threshold=20)
Apply segmentation to
tail.vigor:
segmentation_function = Segmentation.from_config(tail_segmentation_cfg)
segments = segmentation_function.segment(tail.vigor)
We can visualize the results of the segmentation:
Show code cell source
is_bouts = np.zeros(tracking_data.T, dtype=bool)
# Set to True for the indices within the bouts
for on_, off_ in zip(segments.onset, segments.offset):
is_bouts[on_:off_] = True
IdSt = 139000
Duration = 5 * tracking_cfg.fps
fig, ax = plt.subplots(2, 1, figsize=(10, 5), sharex=True)
fig.suptitle("Tail Segmentation", fontsize=16)
x = np.copy(tracking_data._tail_angle[:, 7])
x_bouts = np.where(is_bouts, x, np.nan)
x_nobouts = np.where(~is_bouts, x, np.nan)
ax[0].plot(t, x_nobouts, "tab:gray", lw=1)
ax[0].plot(t, x_bouts, "tab:red", lw=1)
ax[0].plot(t[segments.onset], x[segments.onset], "x", color="tab:green", label="onset")
ax[0].plot(t[segments.offset], x[segments.offset], "x", color="red", label="offset")
ax[0].set(ylabel="angle (rad)", ylim=(-4, 4))
ax[0].legend()
x = np.copy(tail.vigor)
x_bouts = np.where(is_bouts, x, np.nan)
x_nobouts = np.where(~is_bouts, x, np.nan)
ax[1].plot(t, x_nobouts, "tab:gray", lw=1)
ax[1].plot(t, x_bouts, "tab:red", lw=1)
ax[1].plot(t[segments.onset], x[segments.onset], "x", color="tab:green", label="onset")
ax[1].plot(t[segments.offset], x[segments.offset], "x", color="red", label="offset")
ax[1].set(ylabel="vigor (A.U)")
ax[1].legend()
t = np.arange(tracking_data.T) / tracking_cfg.fps
ax[1].set_xlim(t[IdSt], t[IdSt + Duration])
plt.show()
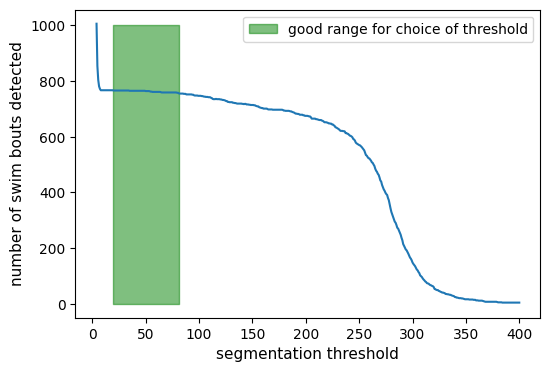
To find the ideal segmentation threshold for your dataset, it is useful to compute the number of bouts detected as a function of the threshold:
# Number of bouts as function of threshold:
thresh_list = np.linspace(4, 400, 500)
num_bouts = np.zeros_like(thresh_list)
for i, thresh in enumerate(thresh_list):
tail_segmentation_cfg = TailSegmentationConfig(
fps=tracking_cfg.fps, threshold=thresh
)
segmentation_function = Segmentation.from_config(tail_segmentation_cfg)
segments = segmentation_function.segment(tail.vigor)
num_bouts[i] = len(segments.onset)
For very small threshold values, too many bouts are detected, while for large threshold values, no bouts are detected. There is an optimal range on the plateau between these extremes where a suitable threshold can be found:
Show code cell source
fig, ax = plt.subplots(figsize=(6, 4))
ax.plot(thresh_list, num_bouts)
ax.fill_between(
thresh_list,
0,
1000,
where=(num_bouts < 767) & (num_bouts > 755),
color="green",
alpha=0.5,
label="good range for choice of threshold",
)
ax.legend()
ax.set_ylabel("number of swim bouts detected", fontsize=11)
ax.set_xlabel("segmentation threshold", fontsize=11)
plt.show()